Date:2024-05-06 16:07:39
For a long time, robotic arms have been striving to achieve flexibility and versatility comparable to human hands. Although traditional industrial robots rely on simple fixtures or suction cups to complete operational tasks, these solutions perform poorly in handling various objects with precision and sensitivity.
To bridge this gap, research teams from the Federal Institute of Technology Zurich and Nanyang Technological University have developed a new solution: a sensing soft skin for robotic hands. This technology aims to endow robot hands with tactile perception abilities similar to human hands.
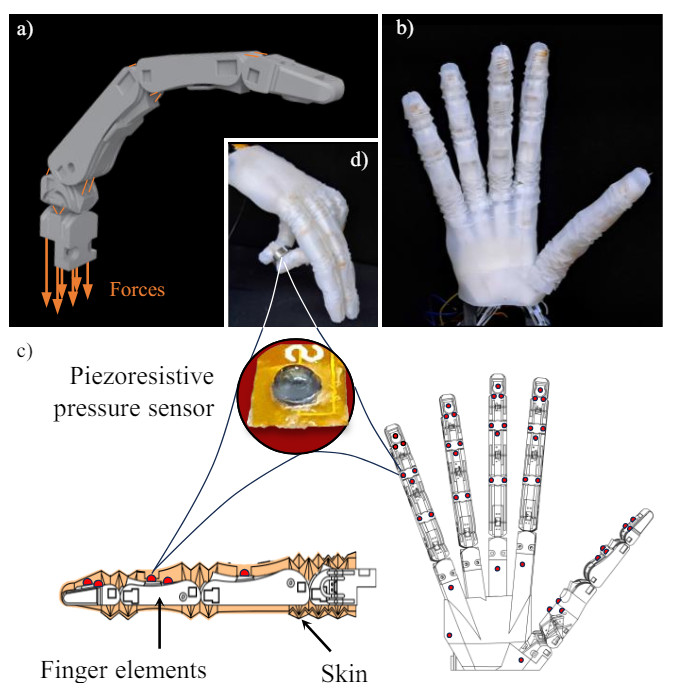
Biomimetic tendon driven hand equipped with rolling contact joints, image from: Federal Institute of Technology Zurich/Nanyang Technological University in Singapore
The robot hand developed by the research team is equipped with 3D printed skin and tactile sensors, with biomimetic tendon driven and rolling contact joints. This complex structure and built-in tactile sensors endow human hands with extraordinary abilities to perceive and manipulate objects. Although robots have made significant progress in utilizing visual feedback to mimic human like operational skills, tactile perception is considered key to further enhancing robot capabilities.
Traditional robot fixtures often lack the complex structure and flexibility required to handle fine objects. To overcome this limitation, the research team focuses on developing a soft skin that can wrap around robot hands, which not only provides joint protection but also improves grip strength by increasing contact area.
The research team utilized multi material 3D printing and origami inspired design to create a flexible and durable prototype of complex skin geometric shapes. The final skin design is cast with silicone, ensuring that the surface of the robot hand is both smooth and sturdy.
The core of this project is to integrate piezoresistive pressure sensors into soft skin, strategically placed in key contact areas of the robot hand, capable of detecting the gripping situation of objects and evaluating gripping strength. This sensing feedback system mimics the proprioceptive ability of the human hand, enabling the robot hand to interact more effectively with its environment.
In order to evaluate the effectiveness of its solution, the research team conducted a series of dynamic and static tests. The results showed that compared to traditional settings, the range of motion and grip strength of robot hands equipped with sensing soft skin were significantly improved.
The development of sensing soft skin for robotic hands marks a significant advancement in the field of robotics technology. This not only enhances the flexibility and versatility of robot operations, but also opens up new possibilities for more complex human-computer interactions in various fields from manufacturing to healthcare.