Date:2026-03-04 09:55:08
Researchers at the MINIMAX lab at the University of Texas (UT) Austin have developed a 3D printable, magnetically steerable capsule robot that’s been designed to diagnose and treat gastrointestinal (GI) conditions, with the aim of reducing patient reliance on invasive endoscopic procedures.
Fangzhou Xia, Director of the lab and senior author of the study paper, had a very personal mission with the research, having undergone multiple invasive Endoscopic Retrograde Cholangiopancreatography (ERCP) procedures in 2022, following repeated gallstone-induced bile duct blockage. The condition ultimately required gallbladder removal surgery.
“The complications were exacerbated by concurrent COVID infection, leading to multiple emergency room visits and repeated ERCP procedures,” stated Xia. “Undergoing multiple ERCPs made me acutely aware of how invasive endoscopic procedures can be, including significant throat irritation, discomfort, and procedural burden, despite being performed for diagnostic and therapeutic necessity.”
UT Austin 3D prints capsule robot for gastrointestinal diagnostics
In the wake of the experience, Xia reached out to Professor Giovanni Traverso at MIT – whose work in ingestible robotics had caught his attention – to begin “developing a body-area-network vision for ingestible and implantable sensing systems”.
“In this work, we focused on the magnetic navigation of a capsule robot in the GI tract, particularly in the stomach area,” explained Xia.
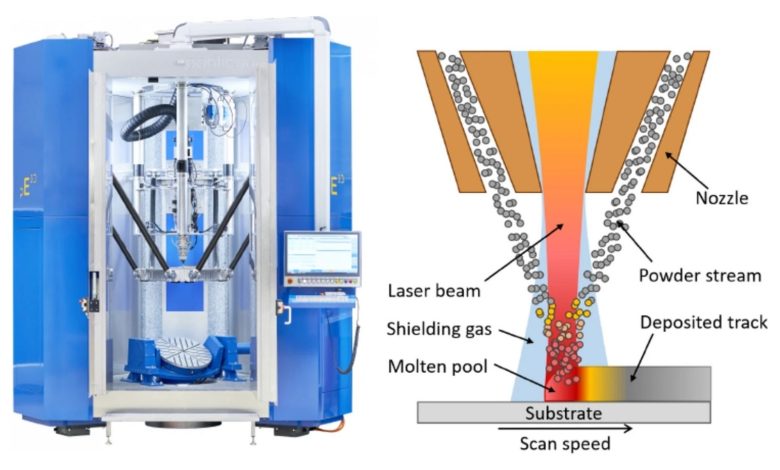
The capsule is coated with an outer shell that’s made from a soft magnetic material produced by mixing neodymium iron boron (NdFeB) particles into silicone. This is then 3D printed with a controlled magnetization direction during deposition, which creates an “optimized NSSN/SNNS magnetic field distribution pattern”. In short, the elimination of a bulky internal magnet leaves space for cameras, sensors, drug reservoirs, biopsy tools, or other therapeutic components.
The magnetization pattern also means predictable, stable rolling and steering under a rotating external magnetic field, without requiring complex feedback control algorithms. The team validated locomotion across smooth, inclined, dry, and wet textured surfaces, which the researchers said demonstrated “robustness under conditions that approximate gastric environments”.